Worn side knobs on a Maxxis Rekon tire from my Mach 4 SL.
This past Tuesday, at the CRAMBA River Bends With Friends ride, I had a both-tires-slide-out fall on a tight, flat, sandy-over-hard trail that resulted in a pretty-decent scrape to my left calf. Why did it happen? Two reasons. One — the primary reason — is because I exceed my ability to handle the bike. Two, the bike’s ability to corner was reduced because I let the front tire get too worn out. So what was fine before, this time… wasn’t. And I didn’t adapt.
While one thinks of a tire wearing out, it’s typically the knobs getting smoothed out, especially along the center. On knobby mountain bike tires, it’s the side knobs which bite into dirt to maintain traction when cornering. And those same cornering forces eat away at the inner edge of the side knobs.
Many high quality tires, such as the Maxxis Rekon 29×2.4 3C/EXO/TR shown above, have harder rubber in the center than on the sides, meaning the center continues to look (and work) fine (in a straight line), even as the sides have failed. (Note the visible siping on the center knobs, still-vertical trailing edges, and even some of the flashing left over from the molding process.)
Eventually the side knobs become undercut, almost like hooked flaps as seen above, and no longer offer much support. Without close inspection, feeling with fingers and such, they often still look sharp or at least sufficient. This loss of support means radically-reduced cornering ability on soft surfaces, and the now-super-flexible knobs make for unpredictability on hard surfaces; almost like riding on loose bits of rubber.
I should have replaced this tire long ago, but I kept putting it off; “I’ll do it after this next ride” because it wasn’t too bad. Until it was.
Whenever I replace a tire I’m starkly reminded of how much better new tires with sharp, crisp knobs feel. It’s a bit annoying that this wear can be hard to see and more needs to be felt for (with fingers), and it also just sort-of sneaks up on you. A long ride with a bunch of paved sections or a trip somewhere a bit rocky can push tires over the edge, even while the other knobs might still look fine.
og-image.png (Default OpenGraph preview image for the site.)
In the biggest clean-up to this site since back 2020 when I took the photo gallery down and static’d the wiki, I’ve cobbled together a new theme and logo, made a bunch of under-the-hood changes, and went waaaay down the rabbit hole automated content cleanup (fixing broken links, missing images, etc). One of the biggest irritations I had with the previous theme, Period, is that it didn’t have great support for code blocks and never really felt like… mine. It worked well enough, so I just stuck with it.
For a logo I just quickly drew something up with a paintbrush in Photoshop than ran it through a vectorizing / site icon generation process, and… I got that. I’m not sure if I’m completely happy with it, but it’ll do for now.
Perhaps long overdue, I moved the server from Apache to Caddy. While Apache is the venerable web server, and been used here for quite some time, I’ve always been a bit fond of using atypical servers (such as lighttpd). I’ve been using Caddy on trailmaps.app for a couple years and been extremely happy with its automatic support for ACME, so with not much else to do yesterday afternoon I flipped things over.
I also put some time in getting OpenGraph (see also opengraph.xyz) working, which helps when links are shared and things are indexed. This just more polish, but makes things nicer, especially as so many things do rich link previews these days.
There is still got some cleanup of the Caddy config to do — removing some old rewrites and MIME types from years-old experiments — but for the first-pass a direct translation of one config to the other made the change-over easy. There’s probably some further tweaking of PHP needed for performance, but that needs some time for the server to settle. I imagine there’ll also be some content cleanup, like fixing filenames for the wiki archive and maybe some old blog post format things, but those’ll (hopefully) get handled as I stumble across them.
This makes me happy, because I feel like I’m knocking a bunch of technical debt items off a long-put-away mental list; things that I deemed too hard-for-then and just accepted. Not bad for a few afternoons/evenings during a heat wave where I’m a bit nonplussed about being outside yet am itching to do something.
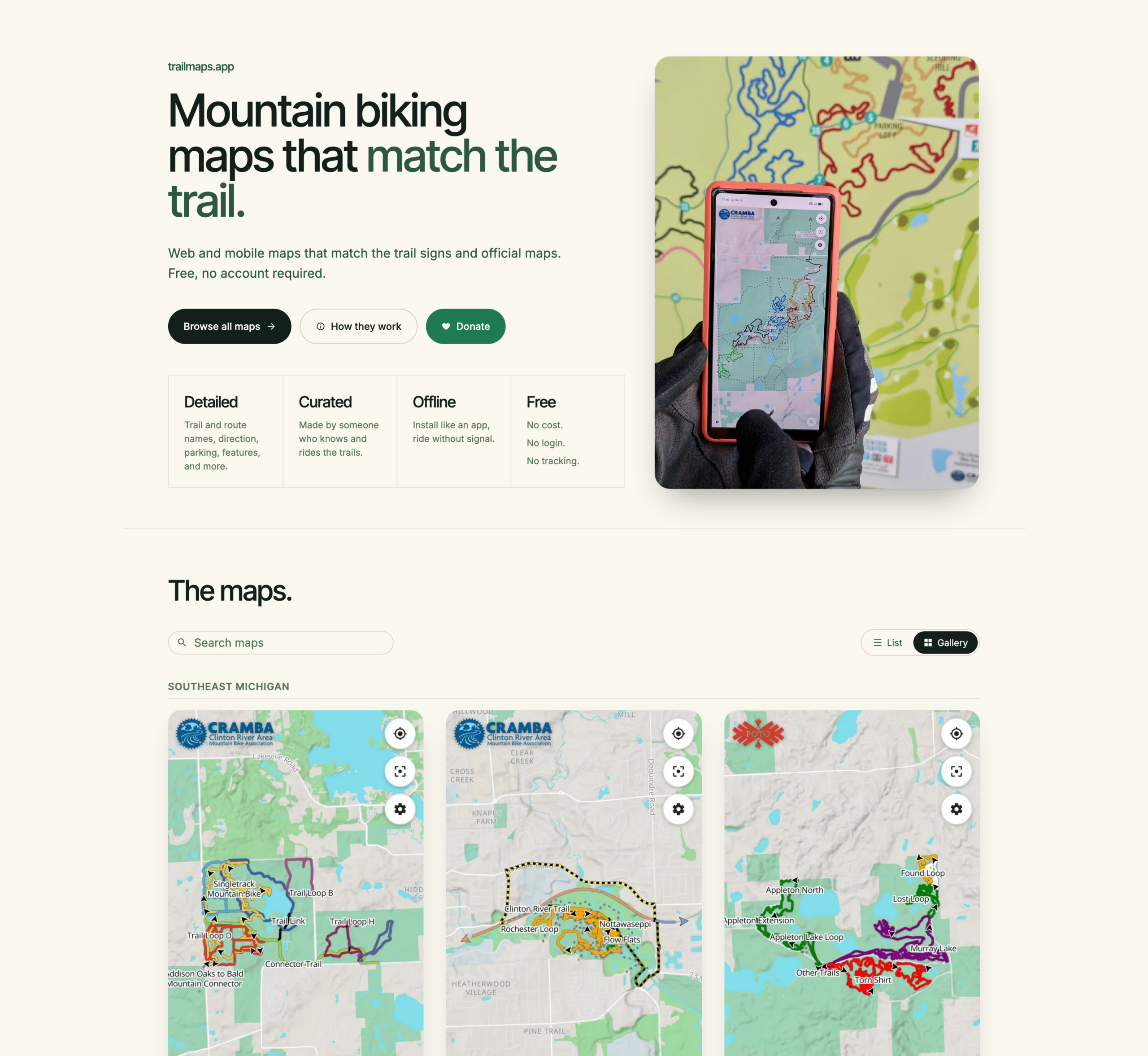
I’ve been using it for a while now, so I guess it’s a good time to announce the revamp / relaunch / whatever of trailmaps.app. This is a personal project website which started one frosty January morning as I sat in an Ishpeming rental waiting for temps to rise before heading out on a fatbike ride and is now a hub for hosting maps I’ve generated of various trail systems.
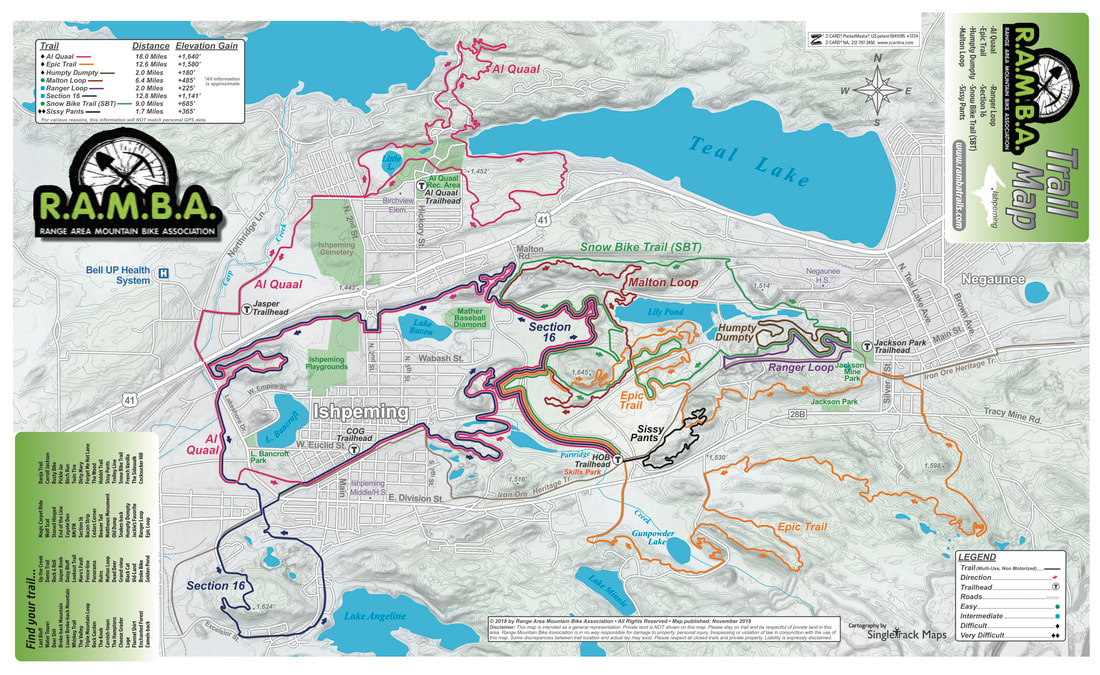
The root of the idea was cooked up on a long drive; I wanted something akin to the subway-map-style’d official RAMBA print map (parallel lines over a single trail to illustrate the trail’s membership in multiple routes), but web based. And maybe usable on a phone. And after the early learning then quite a bit of work this spring… Here it is.
Instead of just doing a single map (one-map-at-a-time coding / tile generation / etc) as I had in the past, I now have a full-on map generator that takes data from OSM and other online/open/free sources, combines it all, and generates static content that’s easy to host and cachable so it works if a device loses cell service. It’s basically as close to an app as one can get while still staying web-based.
By being hand-curated (that is, not just auto-generated off of all OSM data) these maps also fill a long-standing gap with other online maps (eg: Trailforks, MTB Project, Strava, RideWithGPS) in that they don’t style (color) the routes the way official park maps and signage do, making what a rider sees on their phone challenging to align with what they see on a signpost next to a trail.
There’s a bunch more features that this brought about, which I won’t dive into as much depth, but which I’m still quite proud / happy with. The end results are what I want in maps, and it’s nicely reusable:
Reusable map generation engine; I write a YAML description of the map (title, OSM references, info that can’t be found in OSM) and it makes the map. If the engine or data gets updated, re-run the map and/or website generation tools.
PWA (Progressive Web Apps), so they are installable app-ish, but without the app store overhead.
OSM data is not fetched live — it’s a snapshot taken map-generation time — meaning errant edits don’t break the map.
Zero user/usage tracking, including having all assets loaded from trailmaps.app. (I’m trying to support less and less online tracking while still providing a good tool.)
Ability to generate maps custom from non-OSM data, such as race or group ride routes.
Thorough, proper (read: non-shady) SEO such as OpenGraph previews and metadata, making link embedding, sharing, and site discovery by search engines work well.
Hostable for cheap since the only server requirements are TLS and RANGE requests. A $5/mo Nanode from Akamai (formerly Linode) easily does it all.
Stand-alone maps (each map is a self-contained site) makes it possible for them to be hosted elsewhere, such as if one was made for a trail club/org, etc.
And yes, I heavily used AI-assisted development for this. It was quite educational as since I knew the inputs and outputs, use the maps myself, and was able to do quite a bit of QA, the result is great. At my day job in IT there is (as typical) a huge emphasis in using AI tooling to assist us with our work. This served as a nights-and-weekends project that was quite educational and will benefit me in day-job stuff while achieving a personal goal of making something I wanted and useful for others. It also illustrated the interesting balance between what AI-generation is good at (code, bug finding) and what it’s not (wording, stylistic choices that aren’t simple clones, avoiding feature bloat).
I’m subsequently making the map generator itself available under the MIT license so others can use it. I do have an extensive toolchain for generating the website (takes a definition file and generates the maps, creates preview images, updates the index, rsync’s it to the server) but that part is staying closed / non-released because it’s very my-setup-specific.
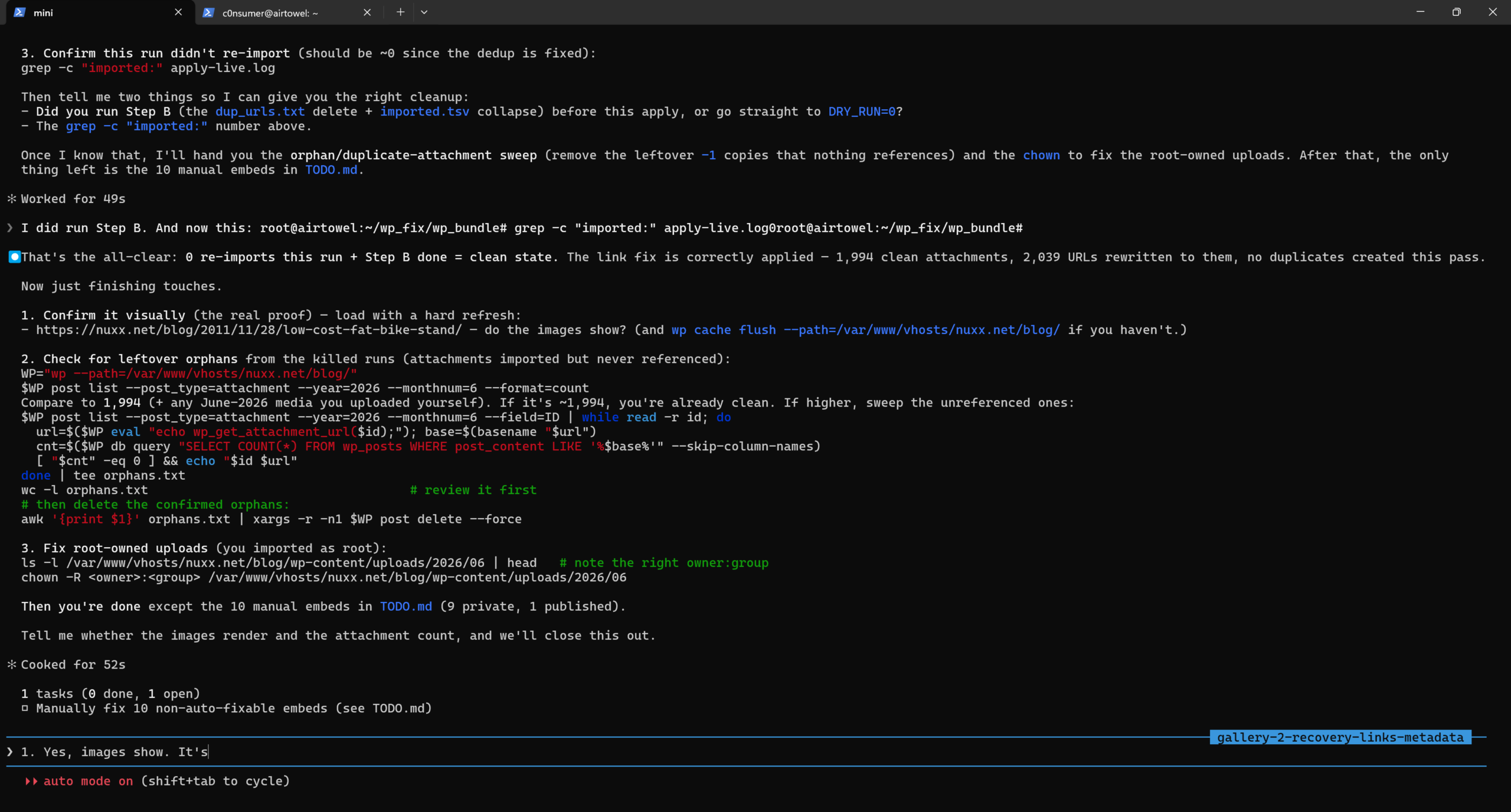
Working in Claude Code to fix broken image links in this blog.
For all the potential problems that come with vibe coded stuff, generating/composing one-off fix-it scripts can be damned handy. For example, this blog got a big tune-up over the past day: almost 2000 embedded images have been unbroken.
For a lot of years I maintained a personal online photo gallery using Gallery2, but as it hadn’t been maintained since 2012, used a lot of server space, and had a very not-modern feel to it, I shut it down in mid-2020 and made a static archive that I just hosted at home. The biggest problem with doing so was that this blog had a lot of images hotlinked into there, so all those posts broke.
Fixing this manually was a pain, and while I kept a copy of the database+images around, somehow using that to fix things was a Big Task that I never started on.
Enter the modern world of AI-assisted coding and over the past few days of vacation, between riding bikes and walks and such, I prompted Claude to develop a solution. What it generated was a series of scripts that identified all posts containing images hotlinked to the old gallery location, found the related images, uploaded them into the Media Library, then edited each post to make it work.
That’s 1994 blog posts whose images have been restored; things like my Low-Cost Fat Bike Stand post are now working again.
This is where I find a ton of benefit to AI tools such as this: putting together the middle (the code) to fix up problems. If the inputs and desired outputs are known, and one can sanity check the system as it evolves, a lot can get done. And quickly. Tools like this have also been hugely beneficial at work, saving me absurd amounts of time with analyzing log files (eg: network captures, Process Monitor output) where I no longer have to timeline things myself.
I’m past the point where I’m surprised, but I’m still really impressed. This has been a long-standing back-of-my-mind problem/quirk with my site that I’d just sort of accepted… But here we are, it’s fixed. Yay!
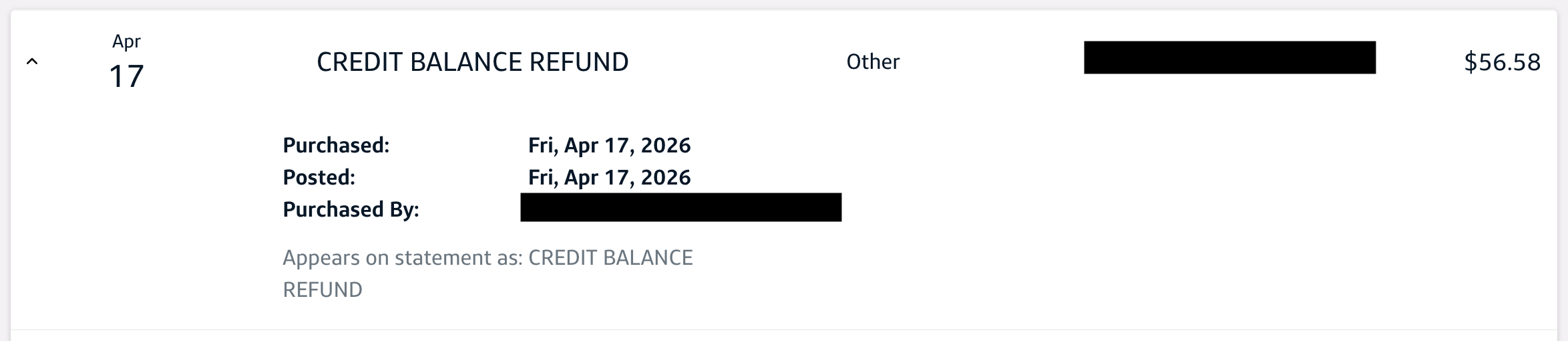
This morning when checking my Capital One credit card statement I saw a surprise item, a CREDIT BALANCE REFUND for $56.58. After some digging I found this is what shows up when a card user received a check requesting a refund of a credit balance (balance owed to the card holder by Capital One).
Online support was of no help, so after speaking to a customer support (and holding) for over half an hour, I got an answer.
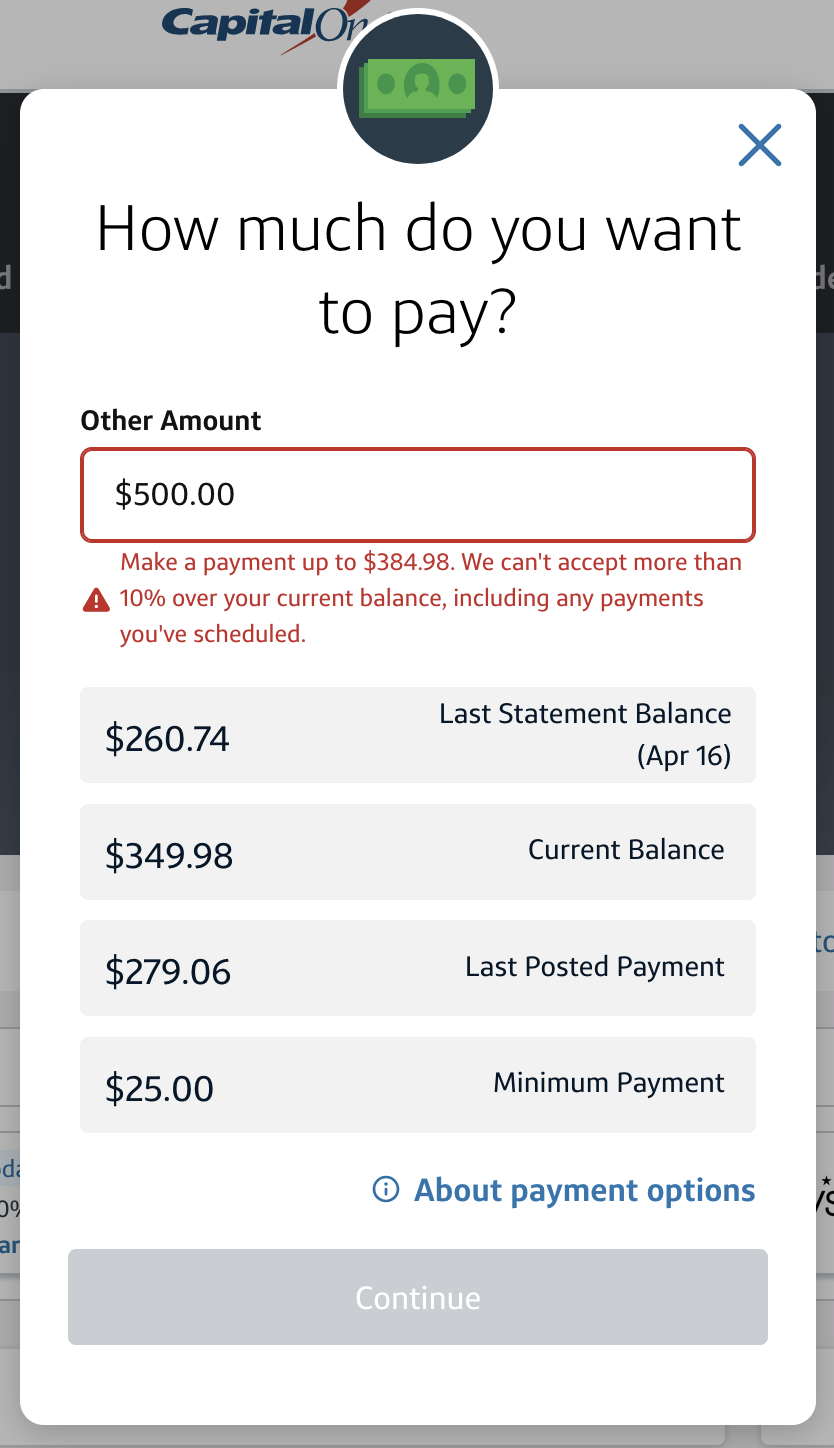
Whenever I go to pay to this credit card, I’m able to pay up to 10% over the current balance, which I tend to do because there’s almost always pending transactions, and it all evens out (returning to a normal balace) within a day or two.
If you have a negative balance, you have options to bring the balance back to $0. Keep in mind that in some situations this happens automatically.
Spend the negative balance: If you have a negative balance, use your credit card like you usually do, and Capital One will apply the account credit toward your purchases.
Get an automatic refund: Capital One will issue a refund if you don’t make any other purchases after two payment cycles. If you don’t use the money for up to four billing cycles, we’ll automatically send a refund check to the address on file. Note, your overpayment must be more than $1.
Request a refund: Capital One will mail your refund within 7 business days of your in-person or written request. Delivery usually occurs within 15 business days but may take longer depending on the mail carrier.
That is, if you don’t use the card for two payment cycles, and don’t spend the whole credit balance within four payment cycles, they’ll send a refund check.
Here’s where the flaw was triggered. Apparently I made an overpayment for the past two months right as the payment cycle was ending. Despite there being plenty of transactions during each billing cycle, and the balance wavering between a credit (from the overpayment) and debit (from normal use), because there was a credit at the end of a number of two consecutive billing cycles, it triggered a check issuance. This was confirmed by the customer support person I spoke with.
This appears to be a flaw in their business logic, with the result being a bit of money floating out there in the postal system for no real reason. It certainly cost Capital One money to issue the check, so it’s a waste of time (for me) and money (for them). As I write this I have $641.30 in pending transactions on this account, with ~$588 of that from the days before the Credit Balance Refund was issued, so sending a refund check is nothing but extra work.
I was hoping to send this to Capital One to share this finding with them, but they don’t have a public email address and I don’t feel like spending any more time on the phone, so I just wrote it up here. Maybe / hopefully the customer support person I was talking with (and their manager, with whom they had to consult on the issue) log it as an issue.
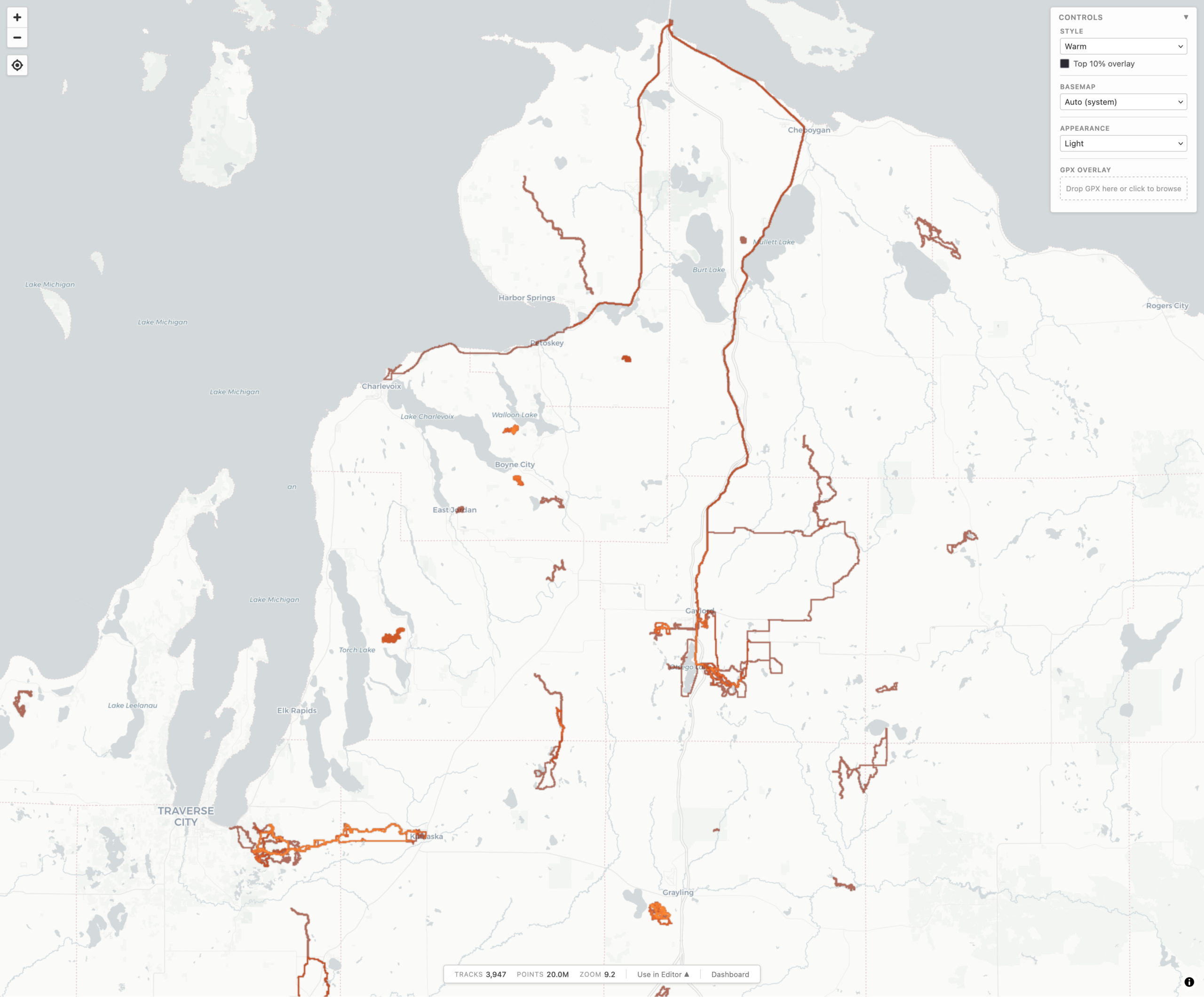
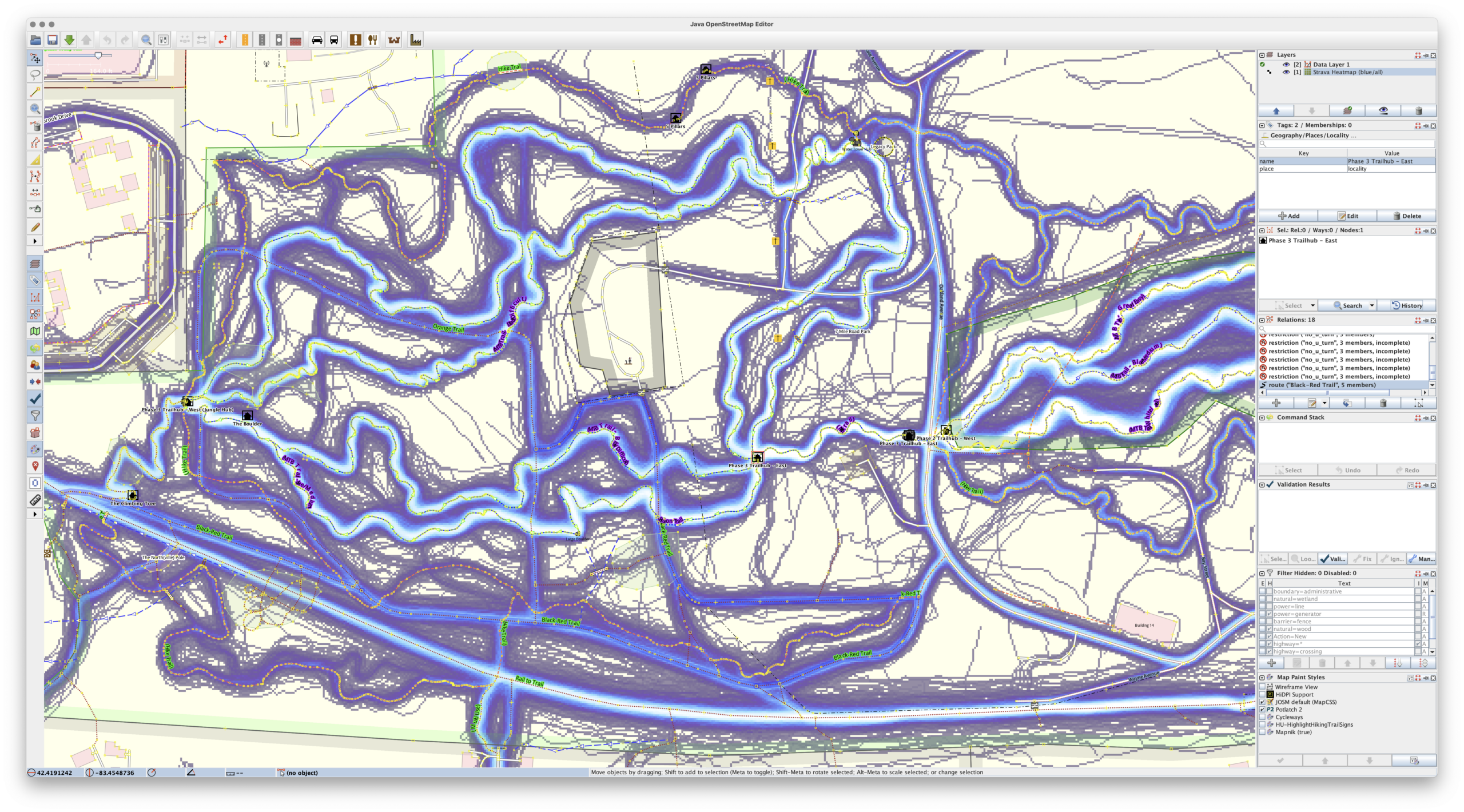
local-heatmap-tile-server v1 showing Northern Michigan in Warm style and Light appearance.
During a long drive to (and from) Florida, and a lot of thinking about maps, I realized something that I really wanted, and something that I could use AI-assisted development to experiment with: generating a heatmap from all my personal, archived activity files. Specifically, generating XYZ tiles, making them available via TMS (so they can be used as an imagery layer in JOSM), and also displaying them on a slippy map.
For years I’ve been using the Strava heatmap as a layer in JOSM for OpenStreetMap (OSM) editing and this works great, but I’m finding myself disconnecting from online social networks, including Strava, more and more. And while the Strava Global heatmap does work as a data layer with a free account, I began thinking about other options to use it, and other cloud providers, less and less. And yes, there’s similar offerings from RideWithGPS and whatnot, but I really wanted to generate my own since it’d give me a lot more flexibility.
So, for my next project working with Claude, I decided to try building a personal heatmap generation tool. And it worked.
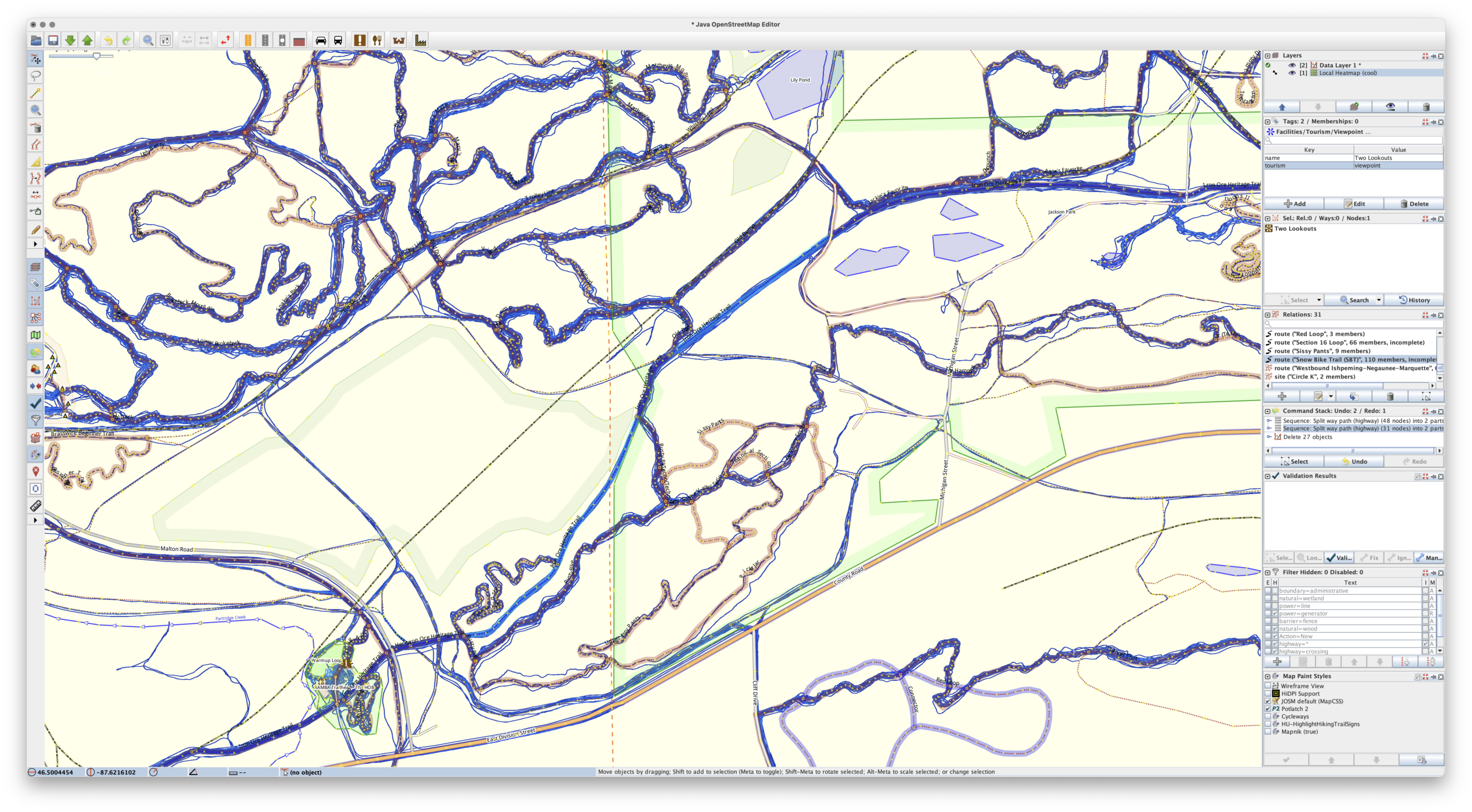
Cool heatmap of my ride and hike data, used as a layer in JOSM. (Ishpeming/Negaunee area.)
Using AI tools to develop software is nothing new, but I’ve never really been one to jump right on brand-new things, instead waiting for them to bake and show their utility before I dig in and use/learn them. I also find it very difficult to learn any tool or system unless I have a way to apply it. But when I do, getting my head around it comes pretty quickly.
In making this I’ve learned / found / finally-realized that with a known set of inputs, a desired output, an ability to identify/recognize bugs, and a task that’s known-possible, AI-assisted development saves can save incredible amount of time. Within reason it makes it possible for me to be more of a product manager than developer. Since I’m not really a developer (my career is in systems management and troubleshooting), that work for me is slow… and I’m not good at it.
Using Claude on the desktop to write the code, VS Code to read and make a few manual edits, and Docker Desktop so I could keep an eye on things, after about a week of free-time iterating, this is what I came up with, and I’m quite pleased:
This is a single Docker container that uses a bunch of Python to import GPS data files (.FIT, .GPX, .TCX), imports, deduplicates, and renders a complete set of XYZ tiles. It then makes them available via HTTP (for display in a slippy map or something like JOSM) or exports them to a PMTiles file for simple hosting. And it has a built-in slippy map viewer/data manager and a couple bundled viewers for completely static hosting (example).
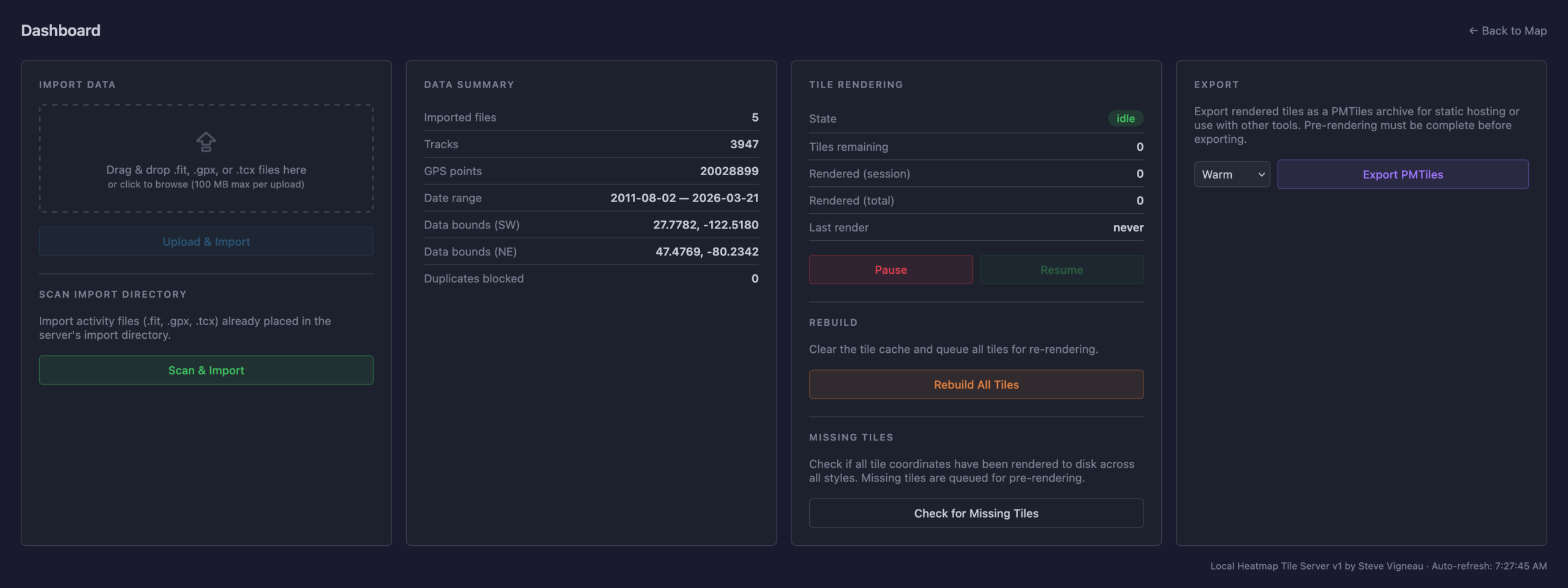
Dashboard for importing new files, stats, and exporting the heatmap for static use.
The Python webserver, uvicorn, isn’t the fastest nor great at caching, so the XYZ tiles are fronted with nginx to very quickly serve them from disk, only passing the request back to uvicorn and the Python stack for rendering if the tile isn’t present. Once the tiles are rendered they are cached very quickly served up solely by nginx, to the point where panning and zooming freely is seamless. (And yes, you can pre-render all tiles for optimal performance.)
It’s been tested on ~4000 track single-GPX files (exported from rubiTrack), ~4000 .FIT files directly from Garmin devices, and a bunch of different types of single GPX files. And… it seems to work!
The file inputs (FIT, TCX, GPX) aren’t special and parsers have existed for a long time. Nothing about heatmaps is new. Tile rendering isn’t new. Tile serving isn’t new. Nor are web-based heatmaps from fitness tracker data. But it needed to be glued together to get something that works this way, and this type of development made it possible. And I learned something new about AI-assisted software development along the way. It’s sure an interesting new world with these tools.
And yes, beyond thinking about the features I had to do a lot of nudging along the way.
Some major bugs that were encountered were getting cross-tile heatmap brightness correct, missing cross-tile data, tiles not rendering properly when called via different ways, moving to a faster web server so panning the map felt smooth, and a whole lot of tweaking of brightness and line thickness and blur and such at different zoom levels so it’d feel nice to use, noticing and dealing with malformed XML in GPXs…
But this was nudging via prompts and having a bit of an idea what it was doing, not coding. Which is what’s so weird and new to me. It’s like directing a team of pretty-decent junior devs.
And the end result is something I’ve wanted for a while. And now it exists. (And no, none of this post was written by any AI tool.)
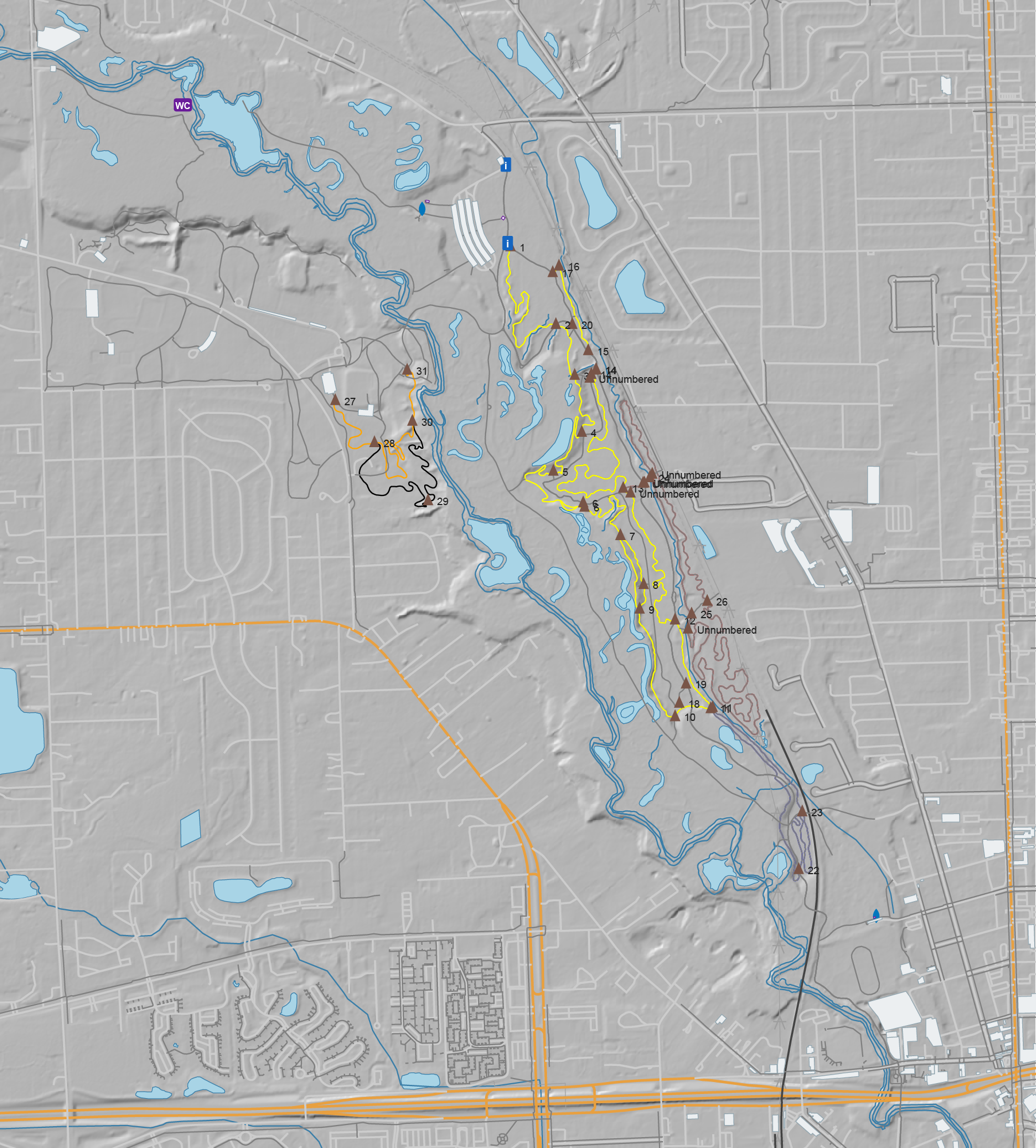
River Bends Park OSM data, with DEM hillshade layer, ready for Adobe Illustrator
After a bunch of years I’ve updated my MTB trail mapping workflow with a much-improved tool for getting OpenStreetMap (OSM) data into Adobe Illustrator. I’ve been experimenting with AI development tools, and I’ve been looking for projects, and this one fit the bill.
My old workflow used osm2ai.pl, a rather crude script (which I found years ago) that’d take an OSM file and turn it into vectors that I’d then group and style in Illustrator. While the tool claimed to filter objects into layers, I never got this working right, so there was a lot of manual work before I could begin styling the map. Each map took a couple of hours solely selecting, joining, grouping, and deleting stuff.
With some time on my hands during a mountain biking trip I began prompting Claude Code, via Visual Studio Code, for something similar: a tool which would take OSM data and make it usable in Illustrator. After a bit of back and forth I ended up with this: c0nsumer/osm_to_ai.
I very intentionally had Claude write everything on this, from the script to the readme, and it seems to have been a success. A bit of experience was gained, and I now have a tool that’ll read in OSM data (either exported from tools or queried live) and produce an Illustrator-compatible SVG that has trails grouped by OSM tag, colored, etc. All ready to finish up in Illustrator. It even has an extra layer of USGS 3DEP hillshade data, something I’ve wanted for years after seeing it on the Noquemanon Trails Network maps (but didn’t know how to do in Illustrator).
This was both a good exercise in using AI tools to assist in simple software development and helped streamline my mapping process. While I have a general discomfort with AI-developed code ending up with potentially uncertain output, this output is immediately validated visually, so it’s fine.
Unplanned, but on quick check this seems to have the side-effect of being compatible with Affinity Designer. While this wasn’t (yet) an intention, I’ve been looking for a good way to move away from Illustrator due to software cost (this is volunteer stuff, after all) but the old osm2ai.pl needed replacing before I could do that. This will make that possible.
So what next? Maybe I’ll see if I can make the PDF maps geospatial. This has long been a goal of mine, as it’d allow my maps to be opened in something like Avenza Maps and they’d show one’s actual location on the trail. But for now, I’ll start here.
As an overview, here’s the --help output to show what it can do:
(venv) PS C:\Users\svigneau\Desktop\OSMtoAI> python .\osm_to_ai.py --help
usage: osm_to_ai.py [-h] (--file PATH | --bbox BBOX | --overpass FILE) --output PATH [--width PX] [--dem PATH] [--fetch-dem] [--dem-resolution METERS] [--sun-azimuth DEGREES]
[--sun-altitude DEGREES] [--save-osm PATH]
Convert OSM data to an Adobe Illustrator-compatible layered SVG.
options:
-h, --help show this help message and exit
--file PATH .osm file to read
--bbox BBOX Bounding box: min_lon,min_lat,max_lon,max_lat
--overpass FILE File containing an Overpass QL query
--output PATH Output .svg file
--width PX SVG width in pixels (height is auto-calculated, default: 800)
--dem PATH GeoTIFF DEM file to generate a hillshade layer (any CRS)
--fetch-dem Download a USGS 3DEP DEM automatically and use it for hillshade. Saves a sidecar .tif next to --output for reuse.
--dem-resolution METERS
Target DEM pixel size in metres for --fetch-dem (default: 3). Use 1 for lidar-quality where available, 3 for 1/9 arc-second, 10 for 1/3 arc-second.
--sun-azimuth DEGREES
Sun azimuth in degrees clockwise from north (default: 315 = NW)
--sun-altitude DEGREES
Sun altitude above horizon in degrees (default: 45)
--save-osm PATH Save the downloaded OSM XML to a file for later reuse with --file
Examples:
python osm_to_ai.py --file mypark.osm --output mypark.svg
python osm_to_ai.py --bbox "-71.12,42.36,-71.10,42.38" --output mypark.svg
python osm_to_ai.py --overpass query.overpassql --output mypark.svg
python osm_to_ai.py --file mypark.osm --dem elevation.tif --output mypark.svg
python osm_to_ai.py --file mypark.osm --fetch-dem --output mypark.svg
python osm_to_ai.py --file mypark.osm --fetch-dem --sun-azimuth 270 --sun-altitude 35 --output mypark.svg
(venv) PS C:\Users\svigneau\Desktop\OSMtoAI>
In our HA instance I have two helpers, each called Interior Lights, with one being a group of switches and the other a group of lights; both containing only things we’d consider interior lights. I then have an automation that turns both groups off, and trigger it from something like All Interior Lights Off which I’ll commonly trigger before going to bed, when leaving the house, etc.
Because a group entity can only hold the same type of entity, and we have lights that are both lights entities (i.e. bulbs) and switches entities (i.e. smart switches controlling dumb bulbs) we need one group for each type.
The specific problem was that two lights in the group group — one being an IKEA TRADFRI 800 lumen bulb and the other BTF-LIGHTING Zigbee single-color LED controller — started acting oddly. At first it was hard to tell what was going on, the IKEA bulb would seem to be on when not expected and the LED strip would be off when it should be on, but eventually I found repeatable cases:
When triggering All Interior Lights Off automation, if the IKEA bulb was already off, it’d turn on at minimum brightness.
After using All Interior Lights Off, the BTF-LIGHTING LEDs, on next on command, would flicker on and then almost immediately turn off.
It turns out the problem was having transition: 0 on the light group’s off automation. Back when doing tweaking for the Hue bulbs I changed this because otherwise these bulbs would dim out over 1-2 seconds instead of just turning off, and I didn’t like this. Unfortunately, this change exposed some bugs.
So I removed the transition from the automation and poof; no more weird problems.
Pick one of the files from the ZIP and let it load.
After it loads, go to Strava’s Global Heatmap, logging in if you need to. Then click the nine-box grid icon (same as the extension’s icon) that appears in the upper-right of the map.
Click Open in JOSM and the global heatmap will appear in JOSM.
To customize things a bit more — which helps quite a bit with visibility in JOSM — one can edit the map by picking a different activity and changing the gColor query in the address bar before opening in JOSM.
gColor options include hot, blue, purple, gray, andbluered. The activity can be changed via sport= and include the main Walk and Ride, and the lesser-used MoutainBikeRide, GravelRide, Snowshoe, etc.
But note that the extension doesn’t support all of these, so you may need to play with the URI in the new tab that opens to get things to display quite as you want. (I guess that’d be easy enough to change…)
UHMW PE replacement ring applied to a CS-M8100-12 cassette.
Stock Y0GX01500 on a CS-M8100-12 cassette.
Many Shimano cassettes, such as the CS-M8100 (XT, 12 speed) have a thin adhesive ring (part number Y0GX01500) on the back side, where it sits against the Microspline freehub body.
Unfortunately, these can easily be lost as they tend to stay on the freehub body when removing the cassette. Which is exactly what happened when I sent the NOBL wheels from my Mach 4 SL‘s in for a warranty rim replacement. Some folks advocate for removing them, believing them to cause cassette wobble, but the main purpose seems to be eliminating noise and fretting between the cassette and freehub bodies.
Since I don’t like bike noises, I wanted another. They can be bought online for something like $9/ea before shipping, but that seems like a lot… So a better solution? Make one!
37mm x 33mm ring cut from UHMW PE on a Cricut.
Measuring a new ring on a spare cassette showed it to be 37mm OD x 33m ID, roughly 0.2mm thick. I have some 0.0115″ / ~0.29mm (Ultra High Molecular Weight Polyethylene (UHMW PE) tape from McMaster-Carr (part 76445A764) that I use for rub on bike frames, so that seems perfect. Kristen cut a ring out with her Cricut (with a Deep Point Blade, set to “thin cardboard”), I stuck it to the cassette, and that was that. Much better than spending $9 and waiting for it to arrive.
I had originally tried to print one with PETG filament, but when the first of two broke coming off the build plate I figured it probably wasn’t the right material and would come apart under load, leading to a loose cassette, noise, etc. UHMW PE tape is very malleable and often used to stop noise between rubbing parts, so it seemed like the better choice.




{kind=link}